 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolylidar3D -- Fast Polygon Extraction from 3D Data
Jul 23, 2020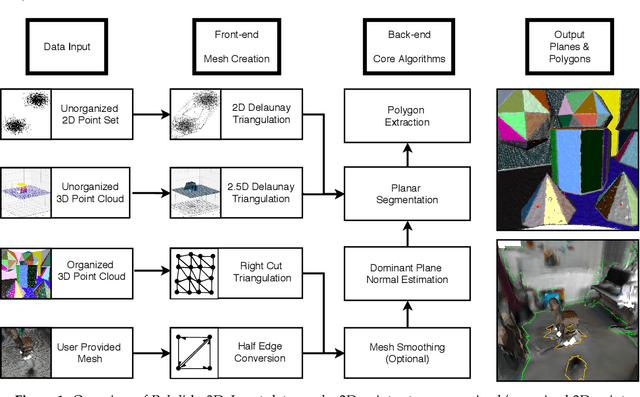

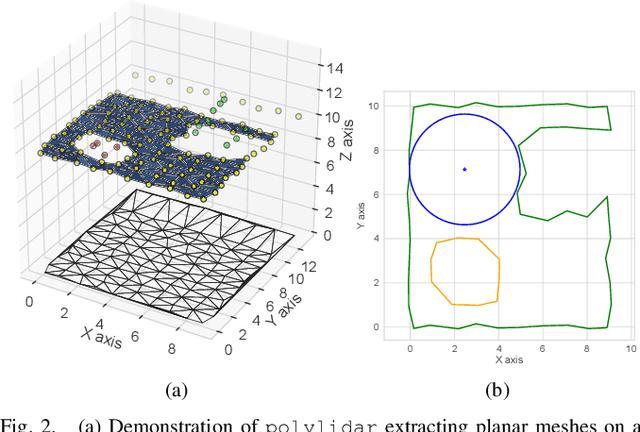
Flat surfaces captured by 3D point clouds are often used for localization, mapping, and modeling. Dense point cloud processing has high computation and memory costs making low-dimensional representations of flat surfaces such as polygons desirable. We present Polylidar3D, a non-convex polygon extraction algorithm which takes as input unorganized 3D point clouds (e.g., LiDAR data), organized point clouds (e.g., range images), or user-provided meshes. Non-convex polygons represent flat surfaces in an environment with interior cutouts representing obstacles or holes. The Polylidar3D front-end transforms input data into a half-edge triangular mesh. This representation provides a common level of input data abstraction for subsequent back-end processing. The Polylidar3D back-end is composed of four core algorithms: mesh smoothing, dominant plane normal estimation, planar segment extraction, and finally polygon extraction. Polylidar3D is shown to be quite fast, making use of CPU multi-threading and GPU acceleration when available. We demonstrate Polylidar3D's versatility and speed with real-world datasets including aerial LiDAR point clouds for rooftop mapping, autonomous driving LiDAR point clouds for road surface detection, and RGBD cameras for indoor floor/wall detection. We also evaluate Polylidar3D on a challenging planar segmentation benchmark dataset. Results consistently show excellent speed and accuracy.
Polygon Extraction from Triangular Meshes
Feb 05, 2020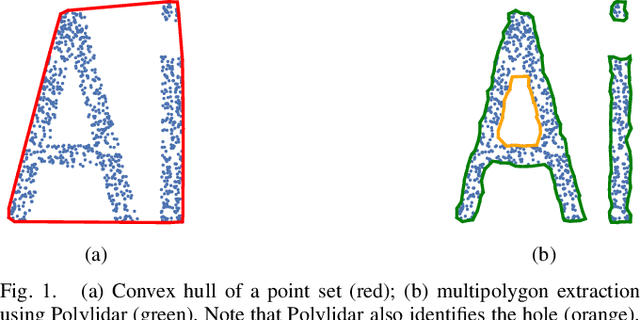
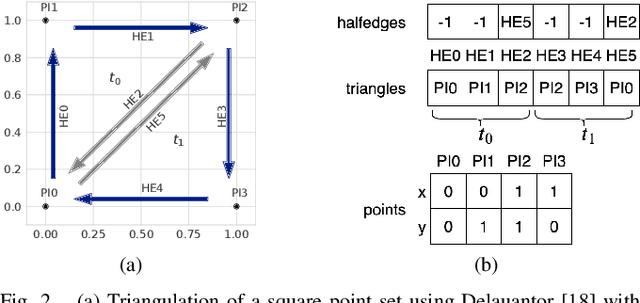
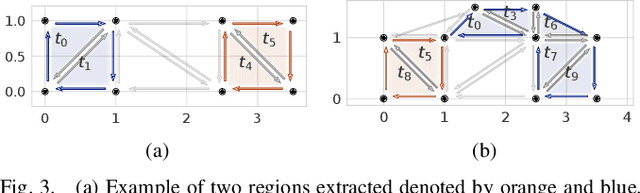
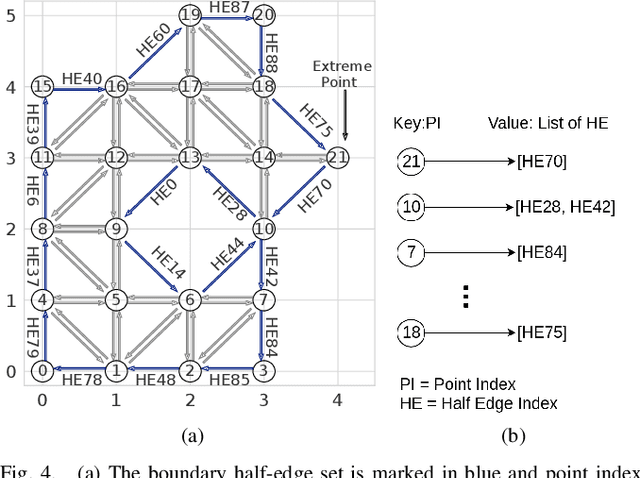
This paper presents Polylidar, an efficient algorithm to extract non-convex polygons from 2D point sets. Polylidar is able to extract multiple disjoint polygons and capture interior holes. The algorithm begins by triangulating the point set and filtering triangles by user configurable parameters such as triangle edge length. Next, connected triangles are extracted into triangular meshes representing the shape of the point set. The key to Polylidar's speed, and the main contribution of this paper, is in efficiently transforming each triangular mesh into a concave polygon. This paper describes Polylidar and provides benchmarks to comparatively evaluate its speed and accuracy. Results show good accuracy and $\sim$ 4 times speedup compared to other concave polygon extraction methods.
Realtime Rooftop Landing Site Identification and Selection in Urban City Simulation
Mar 09, 2019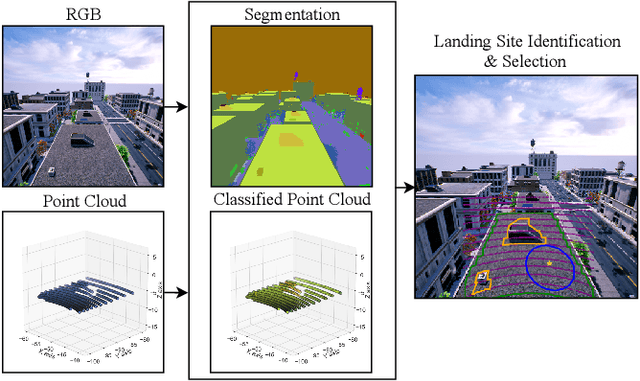

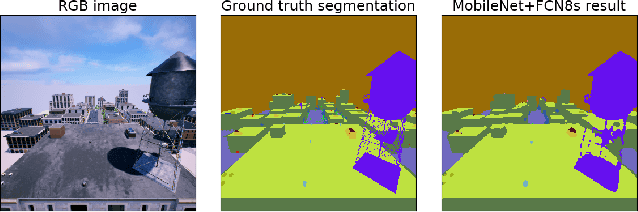
Safe autonomous landing in urban cities is a necessity for the growing Unmanned Aircraft Systems (UAS) industry. In urgent situations, building rooftops, particularly flat rooftops, can provide local safe landing zones for small UAS. This paper investigates the real-time identification and selection of safe landing zones on rooftops based on LiDAR and camera sensor feedback. A visual high fidelity simulated city is constructed in the Unreal game engine, with particular attention paid to accurately generating rooftops and the common obstructions found thereon, e.g., ac units, water towers, air vents. AirSim, a robotic simulator plugin for Unreal, offers drone simulation and control and is capable of outputting video and LiDAR sensor data streams from the simulated Unreal world. A neural network is trained on randomized simulated cities to provide a pixel classification model. A novel algorithm is presented which finds the optimum obstacle-free landing position on nearby rooftops by fusing LiDAR and vision data.